010-Flash Attention、Flash AttentionV2-知乎-毛毛雨
Flash Attention on INTEL GPU - 知乎
Excerpt
来源:https://zhuanlan.zhihu.com/p/607364156
之前是业余看论文写了这篇FlashAttention的介绍,后面team也在做LLM上的优化了,我刚好负责的是kernel的优化,于是花了一个多月的时间,针对intel的GPU实现了FlashAttention,这期间多了很多感悟,所以把文章更新…
之前是业余看论文写了这篇FlashAttention的介绍,后面team也在做LLM上的优化了,我刚好负责的是kernel的优化,于是花了一个多月的时间,针对intel的GPU实现了FlashAttention,这期间多了很多感悟,所以把文章更新下。
自从2017年谷歌DeepMind推出Transformer模型[1],Transformer便取代了RNN模型,成为了NLP领域的Top。如今大火的Bert,GPT系列,以及Stable-Diffusion都是基于Transformer。Transformer的核心是self-attention机制,这也是它区别于RNN的地方,能够一次处理所有的输入数据,而不是像RNN那样一次处理一个,解决了长期依赖问题,也有利于并行。
Transformer模型的训练对硬件的要求往往很高,因为其基本模块,multi-head attention(MHA)的时间复杂度和空间复杂度都是 O(N2) , N 表示sequence length。所以,对于sequence length比较大的模型,MHA的内存开销和性能都容易成为瓶颈。
标准MHA
先来看下标准的MHA的实现。
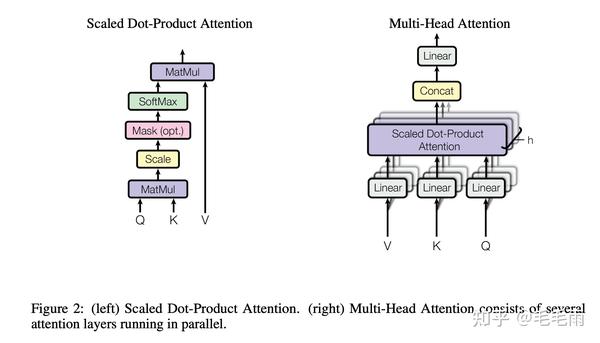
给定 Q,K,V, shape为(BatchSize, NumHead, SeqLen, HeadDim), 基本公式如下:
output\=softmax(QKT∗scale)V
其中Softmax的计算是row-wise的,需要计算整行的max/sum,所以整个计算往往是分成了三步。
- S\=QKT∗scale
- P\=Softmax(S)
- O\=PV
P 是internal buffer, size = BatchSize x NumHead x SeqLen x SeqLen。
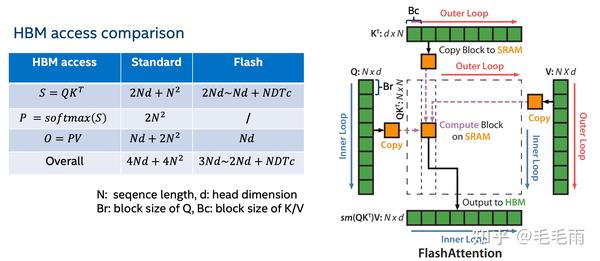
从标准的MHA出发,比较naive的GPU实现是分成3个kernel,第一个是gemm,第二个是point-wise,第三个是gemm,依次执行,这种naive实现的问题有两个,1 是内存开销大,因为需要存储中间结果S/P, 这两个都是 O(N2) ,随着现在模型的sequence length越搞越大,这个内存要求是很高的。 2 是性能问题,在长sequence length的情况下,S/P不能塞到cache里,这样每次读取都是从HBM读,这样latency就比较长。
常见的解法是算子融合。
下面我们来试试,如果想把第二步的softmax融合到第一个gemm,由于softmax是对整行求sum/max,这和gemm常见的tiling策略其实是冲突的,所以融合softmax就对第一个gemm的block切分加上了限制,要么行方向不切,减少并行度,要么做类似k-slicing,增加communication的成本。同理,如果想把这三个融合到一个kernel,不改变softmax计算的前提下,总是要在前面说的两种方法中取一个balance。
这样的做法可以,但是很显然不是最佳solution,尤其是在batch比较小,而sequence length又比较长的case下。那么我们能不能把封印解除呢?融合softmax,但是也还是能做tiling?那就是搞个lazy softmax,分步计算,这其实就接近作者提出的flash attention了[2]。
这个思路是写kernel比较自然的优化思路。我们也可以抛开实现,从问题本身来分析,先看下MHA的算术密集度(arithmetic intensity)。
用 N 表示SeqLen, D 表示HeadDim,先来算下memory operations,这里按理想情况考虑(有一块无穷大的cache),至少需要从HBM 读取 3ND (包括Q/K/V), 写入 ND (指output),总共是 4ND。 再来算下compute operations,忽略中间的softmax的计算,应该是 2∗2N2D , 第一个2是表示前后共有两个GEMM,第二个2是表示每次计算是2个操作,mul和add,那么arithmetic intensity \=4N2D4ND\=N , 可以认为是compute bound。
所以,之前有不少工作致力于减少MAH中的计算量,比如sparse,或者low-rank,降到甚至 O(N) 的复杂度,但是模型的E2E performance却没有得到很大的提升,而且由于这两种方法都会降低精度,也都没有被广泛采用。究其原因,作者认为是没有考虑memory access(IO)的overhead。这里就需要说下hardware的特性了,拿NVIDIA的A100 40GB PCIe举例[3],FP16的flops是312T,而HBM的bandwdith是1,555GB/s,也就是说每从HBM读取一个FP16,至少需要进行 312∗1e121555∗1e9/sizeof(float16)\=401 次运算,才能用满TensorCore,这个要求无疑是非常高的,所以实际上,由于TensorCore的计算速度远高于HBM的load/store速度,如果不能把数据保存在latency更低的cache里(比如A100的L1/SLM),问题往往是受限于I/O,而不是compute。
那问题就落在怎么把数据放cache里?标准的回答是tiling,那softmax怎么tiling?又回到了这个问题。
我认为FlashAttention算法的核心便是softmax的tiling。下面就具体来看下这个:
对于标准MHA的实现,这里摘一段stable-diffusion的代码供参考[4]:
1 | class CrossAttention(keras.layers.Layer): |
Tiling for softmax
回顾下Softmax的公式(一般sofmtax都会加上最大值的处理,主要是为了数值稳定,避免直接计算指数导致数值溢出)。
m(x)\=max(xi),softmax(xi)\=exi−m(x)∑0iexi−m(x)
因为Softmax需要拿到每一行的max/sum,所以一般来说,我们需要等某一行的数据全部ready之后,才进行Softmax操作。那能不能做tiling呢?当然可以,不就是算个max/sum,每次保存当前的max/sum,再逐步更新,最后得到的结果不是一样吗?
假设我们要对数组[x_0, x_1…x_n]进行softmax处理,先处理第一个数
1 | cur_max = x_0 |
然后算第二个数的结果
1 | cur_max = max(pre_max, x_1) |
这个过程中,pre_max/pre_sum被不断更新,这样就可以逐步的计算Softmax了,而不用等到每一行的输入都ready。再把这里的每个数扩充成一个block,那就是tiling了,和前面的gemm完美契合。
Softmax + GEMM
回到MHA,现在有了softmax的tile,那么softmax接在第一个gemm后面就很自然,当普通的post-op处理就可以。复杂一点的地方是,softmax后面gemm,逐步计算中,每次softmax的结果并不是正确的,那如何保证后一个gemm拿到的结果是正确的呢?关键的一点在于,softmax分tile后得到的局部的“错误”的值,这个scale因子,对于整行的所有元素是一样的,都是exp(-max)/sum, 所以只需要在下一次计算除以这个scale,去掉上次错误的影响 ,累计到最后就是正确的结果了。
Talk is cheap, show me the code, 下面是一份简单的python实现
1 | import numpy as np |
再回头对比下Flash attention,由于softmax的tiling处理,gemm/softmax/gemm三步被很好的融合到一起,这样既省掉了中间buffer(S/P)的开销,又能方便地把数据放cache,一举两得地解决了之前标准MHA的两个问题。
理解了算法的基本思路,下一步就是,怎么在intel的硬件上实现一个高效的GPUkernel呢?
Flash Attention GPU Kernel的实现
基本框架
整个MHA的逻辑可以写成如下的伪代码:
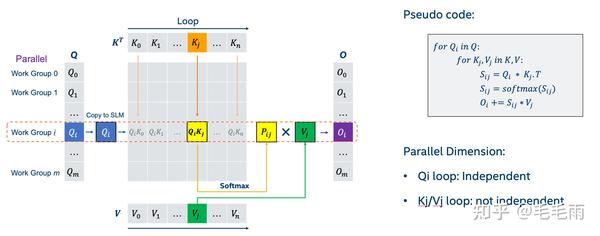
先考虑怎么切分, 首先batch和num_head这两个维度是可以并行的,其次不同Q_i的计算是完全独立的,所以很自然Q的方向也可以做parallel。那要不要切分K/V呢,这就主要考虑occupancy,看前面已经并行的维度能不能把整个硬件塞满,比如intel的数据中心GPU,PVC,一个tile一共有64 XeCore。 而在通常LLM的case里,batch(>=1) x num_head(>=16) x num_beam(4) * parallel_q(>=1)是大于64的,能够塞满整个PVC的一个tile,在这种情况下,如果切分K/V,额外的通信开销就是没必要的,所以我目前的kernel实现没有对K/V进行切分。注:这里说的num_beam是beam search。
考虑了怎么切分,接下来就可以开始着手写了。我这边是基于intel的一个library:XeTLA实现的,这个library可以看作是intel的cutlass,是一个主要针对gemm的模板库,提供了高性能的micro kernel,比如device/workgroup/subgroup level的brgemm。 具体代码上传到了intel extension for tensorflow 这个仓库里,感兴趣的同学可以看看。
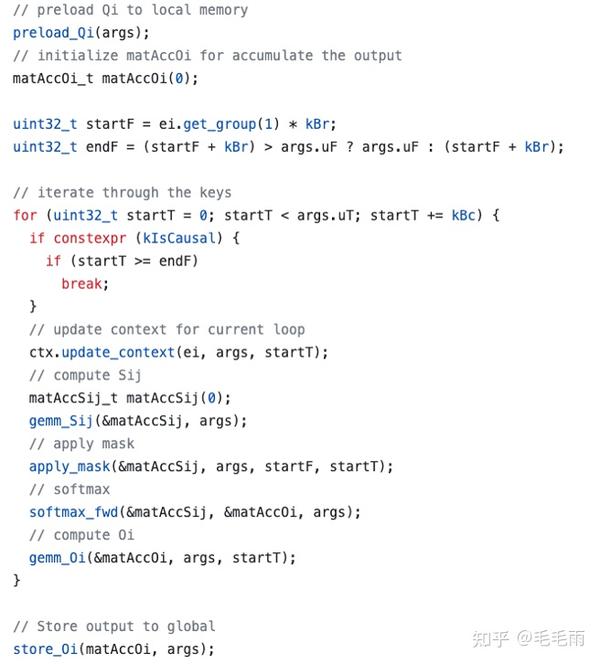
preload Q
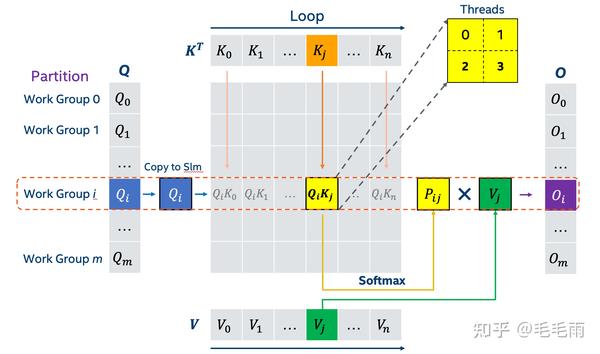
按照前面说的切分,每个workgroup会计算上图的一块 QiKj ,workgroup内部的threads则进一步切分 QiKj ,所以workgroup内不同的thread会share同一份 Qi , 为了避免反复从HBM读取,代码里做了一个preload Q的优化,把当前workgroup 需要的那一小块Q从HBM提前load到shared local memory, 这样可以被整个workgroup share,达到对Q的快速读取。
优化softmax
softmax本质上是reduction,所以套用reduction的常用优化,分成好几个block,先block内部做,然后再block之间做。
按照上图的划分,也就是theads0和thread1先做各自的gemm,然后各自做softmax,最后再整合。这样做的好处是减少同步,每个thread做完gemm就可以接着做softmax,而不需要等待其他的thread。
causal mask
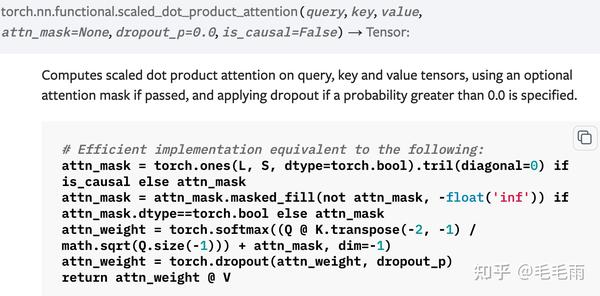
causal mask是decoder里需要的,依照上述pytorch官方的定义,是把第一个gemm的结果的上三角结果置为-inf, 实现上我直接省掉了上三角的所有计算,这样理论上是可以拿到最高2x的性能提升的。
Flash Attention 2
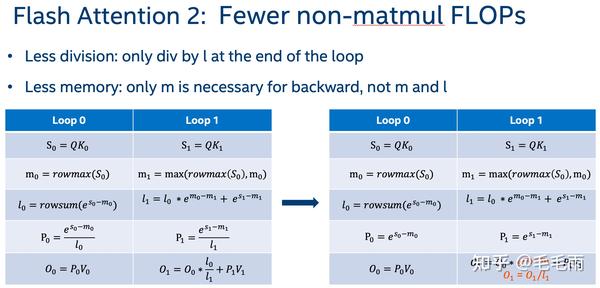
Flash Attention 2出来的时候我马上就看了论文[5],但看完以后有点失望,觉得idea不算很新。总结下来是2点,1是减少了non-matmul的计算,2是更高的并行度。
第一点,从forward的角度看是对Bc的loop里,每次少了一个division,从backward的角度看,减少了中间buffer的大小,不需要m/l都存,只需要一个m了。
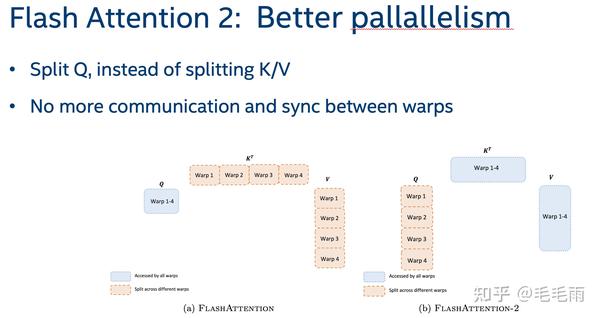
第二点,更好的并行,在Q的维度上加了并行,其实这个思路应该是非常自然的。在Flash attention2出来以前,pytorch2.0里sdp的实现就是这样进行切分的,所以没啥特别。
Flash Attention For LLM
回到如今大火的LLM,对于inference的场景,由于kv cache的优化,从second token开始,每次是输入一个token,也就意味着模型里的MHA中的query的sequence length是等于1的。而大部分gpu的systolic array的设计,比如cuda的tensor core,至少计算一个8x16的矩阵才能拿到满的throughput,intel的pvc的xmx单元也类似,要求大小至少是8x16。所以m=1实际上是一个计算上的浪费, 为了解决这个问题,FasterTransformer里提出了一个新的solution,把问题看成reduction,而不是gemm,用FPU来算,而不是systolic array。我也针对这个实现了一版,实测下来,发现对于inference case性能确实是可以的,因为计算量不大,用FPU还是systolic array区别不大。
写在最后
最后的一点感慨是关于tiling的,flash attention本质上我觉得是解决了softmax的tiling问题,而tiling是为了适配GEMM的,但我们一定要用tiling来解决GEMM相关的问题吗?有没有其他solution。
参考
- ^https://arxiv.org/abs/1706.03762
- ^https://arxiv.org/abs/2205.14135
- ^https://www.nvidia.com/content/dam/en-zz/Solutions/Data-Center/a100/pdf/nvidia-a100-datasheet-us-nvidia-1758950-r4-web.pdf
- ^https://github.com/divamgupta/stable-diffusion-tensorflow/blob/master/stable_diffusion_tf/diffusion_model.py#L138
- ^https://arxiv.org/abs/2307.08691